�p�㱻��(d��ng)���еIJ���(w��n)�����εĔ�(sh��)ֵӋ(j��)��
���ٙ�Ŀ����(sh��)�W(xu��)Փ�� �l(f��)�����ڣ�2011-06-11 08:04 ��ȣ�
����ժҪ���������p�㱻��(d��ng)���Є�(d��ng)���W(xu��)ģ�͵Ļ��A(ch��)�ϣ����Ƚ�Bһ�N���^��Ҋ�xɢӳ��ϵ�y(t��ng)�IJ���(w��n)�����εĔ�(sh��)ֵӋ(j��)�㷽�����xȡ��һ�NӋ(j��)���ٶȿ켰���ȸߵĔ�(sh��)ֵӋ(j��)�㷽��������ԓ�㷨��(y��ng)�õ��p�㱻��(d��ng)���еIJ���(w��n)������Ӌ(j��)���У�Ӌ(j��)���c�����������W(xu��)����(sh��)Ӱ��µ��p�㱻��(d��ng)����ģ�͵IJ���(w��n)�����Σ��Ķ��\(y��n)��Ӌ(j��)��C(j��)�����p�㱻��(d��ng)����ģ�͵ķ�(w��n)���Ͳ���(w��n)�����ε�ֱ�^�D�����M(j��n)һ���о��p�[ϵ�Ļ����(d��ng)�B(t��i)�О�춨�˻��A(ch��)��
�����P(gu��n)�I�~���p�㱻��(d��ng)���У�����(w��n)�����Σ�ͬ���ޖřڣ�
����
����1����
�����p�㱻��(d��ng)����ģ���ڔ[��(d��ng)����ײ�^�����p�[�\(y��n)��(d��ng)���p�㱻��(d��ng)����ģ���Dz����C(j��)�����I(l��ng)��һ��(g��)�µ��w�S[7]�����Ժ��Ρ���(ji��)�ܵȪ�(d��)�صă�(y��u)�c(di��n)�ɞ��˺ܶ��W(xu��)�ߵ��P(gu��n)ע������(j��)�p�㱻��(d��ng)���������ɶȵĔ�(sh��)Ŀ��������Ҫ�о��ɂ�(g��)���ɶȱ���(d��ng)����ģ�ͣ���ˣ��p�㱻��(d��ng)����ģ�ͱ�������һ�N�p�㱻��(d��ng)����[5]��
�����p�㱻��(d��ng)�����еĻ����О���һ�N���H��Ȥ������Ҫ���x�ĬF(xi��n)��
����2�xɢӳ��ϵ�y(t��ng)�IJ���(w��n)�����εĔ�(sh��)ֵӋ(j��)�㷽��
�������L�����㷨�Ļ���˼����:�����ʼ�����𣬰��ղ���(w��n)�������ϵ��c(di��n)�����ԭ������L����[2]�����㷨�����ϵ�һϵ���c(di��n)������܉�E�������B�m(x��)�c(di��n)֮�g�ľ��εľ��Էֶ�(n��i)���ڽ��ơ��_ʼ���܇������x��һ�c(di��n)��ʹԓ�c(di��n)λ�ڵľ��Խ����ϡ���ʼ���о��ǡ���Ӌ(j��)�����c(di��n)��ÿ���У���������������һ��(g��)�ϵ��c(di��n)�����˵��_(d��)�M���Ҫ����������(j��)��(sh��)ֵ�c(di��n)�����������ҵ�����IJ��L����(d��ng)ǰ�c(di��n)�c���c(di��n)������ࡣȻ����ij��(g��)�����ό��ҵ����c(di��n)��ԭ��
������?y��n)鲻��(w��n)�������Ǵ����xɢ���c(di��n)�M�ɣ��O(sh��)�@Щ�c(di��n)�ļ��Ϟ顣ԓ�㷨�Ļ���˼���ǰ����ԭ������L�����U(ku��)������[1]�������õ�ԓ���L����������Ҫ�@���еăɂ�(g��)�c(di��n)[2]����ô�ڵ����С�������(n��i)�xȡ�c(di��n)������c�ľ��xҪ����ӳ������c(di��n)�x��ͨ��������(j��ng)�(y��n)���_���������t����(w��n)�����εij�ʼ���ƞ顣��(zh��)��ԓ�㷨��Ҫ�ij�ʼ���L�飬ԭ���L�飬���L�Ȟ顣����(j��)ԓ���L�ȼ���ѭ�h(hu��n)Ӌ(j��)���к�����c(di��n)����Ӌ(j��)���У����ˑ�(y��ng)�ô��㷨�����������c(di��n)����Ϣ���������
�������c(di��n)������(bi��o)λ�ã�
�������ij�ʼ�c(di��n)���l(f��)����ԓ܉����(j��ng)�v���L�ȣ�
�������c(di��n)��ԭ�������(bi��o)λ�ã�
�������ij�ʼ�c(di��n)���l(f��)����ԓ܉����(j��ng)�v���L�ȣ�
�������c(di��n)��̎���εĺ�һ�c(di��n)����(bi��o)��̖��
�����O(sh��)�ѽ�(j��ng)Ӌ(j��)�����ǰ��(g��)�c(di��n)������(d��ng)ǰ���F(xi��n)����Ҫ�ز���(w��n)������Ӌ(j��)�����̎�ġ��O(sh��)�IJ��L�飬��ԭ��IJ��L�顣��D1��ʾ��������̎�����L�����顣����(j��)ԓ���L���������Д����ĵIJ��L�飬���ԡ�����̎���εăɂ�(g��)���c(di��n)�քe��ͣ����ԣ��҂��ɰ���(1)ʽӋ(j��)�������(bi��o)���ٌ��M(j��n)��ӳ��õ����c(di��n)����(bi��o)�飬Ȼ������̎�IJ��L�顣
������1��
����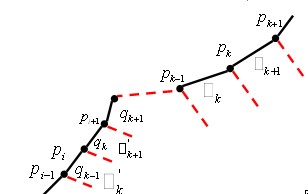
�����D1Ӌ(j��)�����һ�c(di��n)
����������L�п����^����ô܉���ϼ��ُ��۵IJ��ֿ��ܱ�©����������LҲ�п����^С����ôӋ(j��)��ó��ܶ��o�õ��c(di��n)���㷨��Ӌ(j��)���ٶȼ�Ч�ʺܵ͡���ˣ�ͨ�^�������εď����̶ȁ��Дಽ�L�Ƿ���m����D2��ʾ�����c(di��n)�����ď����̶ȿ���������
�����ĊA�Ƕ�������?y��n)?br />
����������(d��ng)��С�r(sh��)�������У����Կɰ���(2)ʽӋ(j��)�㡣
������2��
����������ÊA�ǿ��Կ��ƵĴ�С���磨3)ʽ��ʾ������M��˗l������ô����һ��������(n��i)�����ơ�����ʹ������ֵ����ô�f���^�t���p���ٴ�����Ӌ(j��)�㣬�����С����Сֵ���f���^С���t�������ٴ�����Ӌ(j��)�㡣ֻ�п��ƵĴ�С��������Ч���ƾֲ���(n��i)���`��ұ��C�㷨�ĸ�Ч�Ժ;��_�ȡ�
����(3)
����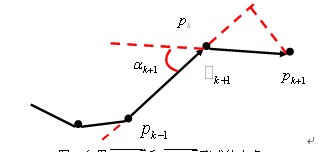
�����D2�������γɵĊA��
��������M��Ҫ�t�������Ϣ��������������ԓ�c(di��n)�����С����@���^�m(x��)ѭ�h(hu��n)Ӌ(j��)����ȥ��ֱ���_(d��)������(w��n)�������L��Ҫ���ֹ��
����3.Ӌ(j��)�����Α�(y��ng)�Ì�(sh��)��
����������������ϵ�y(t��ng)��
������4��
�����@���ȡ�鱾ϵ�y(t��ng)��Poincaré���棬��ô����(y��ng)Poincaréӳ��ɶ��x�飺�������⣬��ʾ�ij��l(f��)��ϵ�y(t��ng)���������ٴλص��r(sh��)�Ľ��c(di��n)��
�����p�㱻��(d��ng)����ģ�̈́�(d��ng)���W(xu��)�О���������ГQϵ�y(t��ng)��������
������5��
��������k��ʾб�µăA�ǡ��@����ГQ�����ǣ�
����(6)
�����ГQ����(sh��)�飺
����(7)���܉��һ�����_(d��)�ГQ���Σ�ϵ�y(t��ng)��B(t��i)����ͨ�^�ГQ����(sh��)���D(zhu��n)���µij�ʼ��B(t��i)�^�m(x��)�\(y��n)��Ӌ(j��)�㡣����̎��ɂ�(g��)ϵ�y(t��ng)�IJ��B�m(x��)�ԣ���ȡ�ГQ��������ϵ�y(t��ng)Poincaré���档���ڱ����ϵ�y(t��ng)�ɕr(sh��)�g�B�m(x��)ϵ�y(t��ng)(4)���ГQ����(sh��)(7)�M�ɣ����ԣ�ֻҪ�о�����(y��ng)Poincaréӳ����ГQ����(sh��)�ď�(f��)��ӳ�䣬�õ��˶��S�xɢӳ��ϵ�y(t��ng)���w���_(d��)ʽ��Poincaréӳ��ͨ�^��(sh��)ֵӋ(j��)�㷽���õ���
���������������㷨�M(j��n)��Ӌ(j��)�㣬
��������ǵõ���
������8���ͣ�9��
�������ГQ����(sh��)׃?y��u)?br />
������.��10��
������ˣ��҂���
������11��
�����@Ȼ��Ӌ(j��)����P(gu��n)�I��Ӌ(j��)��Poincaréӳ�䡣�м�(x��)�^�죬���y�l(f��)�F(xi��n)��ȡֵ�H�ɺͷ����Q�����;�λ���ϣ�����ڶ�����(bi��o)�����H�ɛQ��������
������
����������x���ֵ�r(sh��)��ֻҪ��ͷ����M��
��������12��
������ô��(f��)��ӳ��Ϳɱ�������ƽ���ӳ�䡣
��������^���(y��n)�C����һ�S�����㷨���ٶȺ;��ȣ��xȡk=0.009���@�r(sh��)����һ��(g��)��(w��n)��ƽ���c(di��n)��
����Ӌ(j��)���ԓӳ��һ�S��(w��n)�����κ�һλ����(w��n)������ֱ�^�D����D4,5��ʾ��ͨ�^���㷨��߀Ӌ(j��)���c���������(w��n)�����κͷ�(w��n)�����δ��ڙM���ཻһ�c(di��n)����D6��ʾ����ˣ���������^�m(x��)�����³�����ô���ڲ���(w��n)�����κͷ�(w��n)������֮�g�o�F����p�Y(ji��)������(d��o)��ͬ��y�����M�ؖř�Ч��(y��ng)���Ķ��N(y��n)���ܶ���(f��)�s��(d��ng)�B(t��i)�Ļ����(d��ng)���W(xu��)�О顣
����
�����D4��(d��ng)�r(sh��)���p�㱻��(d��ng)���еķ�(w��n)������
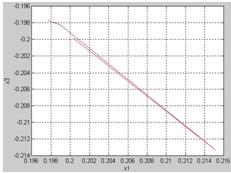
�����D5��(d��ng)�r(sh��)���p�㱻��(d��ng)���еIJ���(w��n)������
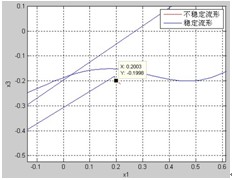
�����D6��(d��ng)�r(sh��)����(w��n)�����κͲ���(w��n)�����ξֲ��M���ཻ
����4�Y(ji��)Փ
����������һ�N���L���ε��㷨˼�����A(ch��)��Ӌ(j��)��ͷ����p�㱻��(d��ng)����ģ�͵Ą�(d��ng)���W(xu��)�����О顣��������������(w��n)�������㷨���ԣ�ԓ�㷨���@�����������Ӌ(j��)���ٶȺ;��ȣ��p��Ӌ(j��)���`�ԓ�㷨����ε��p�㱻��(d��ng)����ģ���M(j��n)�����(y��n)�C��Ӌ(j��)��ԓϵ�y(t��ng)����(w��n)�����κͷ�(w��n)�����Σ��l(f��)�F(xi��n)��һ�S����(w��n)�����κͷ�(w��n)�����ΙM���ཻ���Ķ����p�㱻��(d��ng)���е��M(j��n)һ���о�����(ji��n)��(sh��)����Փ���A(ch��)�������N(y��n)�������Ӻ����ڽ�Ä�(d��ng)���W(xu��)�����О�������
���������īI(xi��n)��
����1.����ɣ����嶼������.�p�㱻��(d��ng)���е���?f��)��R���c���磬���W(xu��)�ڿ���2009
����2.����.�xɢϵ�y(t��ng)��һ�S����(w��n)������Ӌ(j��)�㣬��(sh��)��ͨ�ţ�2009
����3.���嶼���������ܼt�����xɢϵ�y(t��ng)�Ķ��S����(w��n)������Ӌ(j��)�㣬�ؑc�]늴�W(xu��)��2010
����4.����,���,������,�p��ģ�Ͳ����еı����ڲ��B(t��i)�ͻ��粽�B(t��i)�F(xi��n)��[J],�����W(xu��)��(b��o)��2009��58��6����3772-3779.
����5.������,�p�㱻��(d��ng)���ЙC(j��)�������߷�(w��n)���Ե��о�,�����I���I(y��)��W(xu��)�Tʿ�W(xu��)λՓ�ģ�2008.
����6.�����A���p�㱻��(d��ng)���ЙC(j��)�������ܷ�����һ�N��(d��ng)��ݔ�뷽���о���ʿՓ����2010.
����7.ë�£�������ë�£������ڵȣ��p�㱻��(d��ng)�����о��C�����C(j��)���ˣ�2007��29(3)��274~280.
����(bi��o)�}���p�㱻��(d��ng)���еIJ���(w��n)�����εĔ�(sh��)ֵӋ(j��)��
�D(zhu��n)�dՈע�����ԣ�http://m.wangshangbanli.cn/fblw/jiaoyu/shuxue/9351.html
���P(gu��n)���}���
�zӰˇ�g(sh��)�I(l��ng)��AHCI�ڿ����]��Phot...�P(gu��n)ע:106
Nature���¶��W(xu��)���ӿ�Nature Com...�P(gu��n)ע:152
��С�W(xu��)�̎�ֵ���˽⣬�@Щ�����W(xu��)...�P(gu��n)ע:47
2025�ꌑ����W(xu��)Փ�Ŀ����õ�19��(g��)...�P(gu��n)ע:192
�y�L�I(l��ng)��Ƽ������ڿ��x�� �p����...�P(gu��n)ע:64
���r(sh��)�_Փ�ęz���C������Ҫ�P(gu��n)ע:52
�Ї�ˮ�a(ch��n)�ƌW(xu��)�ڿ��Ǻ����ڿ����P(gu��n)ע:54
���H������Ҫ�˽�Ć��}����P(gu��n)ע:58
���������ܷ��u�Q���P(gu��n)ע:48
��ŌW(xu��)����Щ��Ͷ���SCI�ڿ���ֵ...�P(gu��n)ע:66
ͨ�Ź����ИI(y��)Փ���x�}�P(gu��n)ע:73
SCIE��ESCI��SSCI��AHCI�ڿ�Ŀ�...�P(gu��n)ע:121
�u�Q�l(f��)Փ�ĺ�߀�dz������P(gu��n)ע:68
��(f��)ӡ��(b��o)���Y����Ҫ�D(zhu��n)�d��Դ�ڿ���...�P(gu��n)ע:51
Ӣ���ڿ����峣Ҋ��Փ�Ġ�B(t��i)����...�P(gu��n)ע:69
Web of Science ���ĺϼ��ڿ��u��...�P(gu��n)ע:59
����Փ�ķ���
�������g(sh��)Փ�� �������Փ�� Ӱҕ����Փ�� ˇ�g(sh��)����Փ�� �w���ƌW(xu��)����Փ�� ���Ľ���Փ�� ���˽���Փ�� �I(y��)����Փ�� �����W(xu��)Փ�� �W(xu��)ǰ����Փ�� С�W(xu��)����Փ�� �ЌW(xu��)����Փ�� ���Ƚ���Փ�� �ߵȽ���Փ�� ���ČW(xu��)Փ�� ��(sh��)�W(xu��)Փ�� ����Փ�� ���W(xu��)Փ��

SCI�ڿ�����
- MEASUREMENT SCIENCE and TECHNOLOGY�п�Ժ�օ^(q��)
- MEAT SCIENCE�ڿ������п�Ժ�օ^(q��)
- MECCANICA�п�Ժ�ׅ^(q��)
- MECHANICAL ENGINEERING�п�Ժ�օ^(q��)
- MECHANICAL SYSTEMS AND SIGNAL PROCESSING�ڿ������п�Ժ�օ^(q��)
- MECHANICS OF MATERIALS�ڿ������п�Ժ�օ^(q��)
- Mechanics of Solids�п�Ժ�օ^(q��)
- MECHANICS OF TIME-DEPENDENT MATERIALS�ڿ������п�Ժ�օ^(q��)
- MECHANISM AND MACHINE THEORY�п�Ժ�ׅ^(q��)
- MECHATRONICS�s־���п�Ժ�ׅ^(q��)